Question:medium
If a vector \( \vec{v} = 3\hat{i} \) is rotated in the \( x - z \) plane by an angle \( \theta \) with respect to \( x \)-axis in the clockwise direction, then for an observer at \( +y \) axis the vector will be
If a vector \( \vec{v} = 3\hat{i} \) is rotated in the \( x - z \) plane by an angle \( \theta \) with respect to \( x \)-axis in the clockwise direction, then for an observer at \( +y \) axis the vector will be
Show Hint
To easily visualize rotations in three dimensions, use your right hand: point your thumb along the axis of rotation (the \( +y \) axis in this case). Your curling fingers show the direction of counterclockwise (positive) rotation, which goes from \( +z \) to \( +x \). Therefore, a clockwise (negative) rotation must go from \( +x \) to \( +z \).
Updated On: May 28, 2026
- \( 3\sin\theta\hat{i} \)
- \( 3\cos\theta\hat{i} \)
- \( 3\sin\theta\hat{i} + 3\cos\theta\hat{k} \)
- \( 3\cos\theta\hat{i} + 3\sin\theta\hat{k} \)
Show Solution
The Correct Option is D
Solution and Explanation
Step 1: Understanding the Concept:
The problem involves the rotation of a vector in a specific plane within a 3D coordinate system.
A vector \(\vec{v}\) originally lies along the \(x\)-axis. Its initial coordinates are \((3, 0, 0)\).
It is rotated in the \(x-z\) plane. An observer looking from the \(+y\) axis sees the \(x-z\) plane as their field of view.
In a standard right-handed coordinate system, looking from the \(+y\) axis down to the origin, the \(x\)-axis points to the right and the \(z\)-axis points upward in that view.
Rotating "clockwise" with respect to the \(x\)-axis from the \(+y\) observer's perspective means the vector moves from the positive \(x\)-axis toward the positive \(z\)-axis.
Step 2: Key Formula or Approach:
For a vector of magnitude \(A\) rotated by angle \(\theta\) in a plane:
Component along starting axis = \(A \cos\theta\).
Component along the axis it is rotating towards = \(A \sin\theta\).
Step 3: Detailed Explanation:
The magnitude of the vector is \(|\vec{v}| = 3\).
Initially, it is along the \(+x\) direction (\(3\hat{i}\)).
The rotation takes place in the \(x-z\) plane.
When viewed from the \(+y\) axis, the standard 2D axes are \(x\) (horizontal) and \(z\) (vertical).
A clockwise rotation by angle \(\theta\) starting from the positive \(x\)-axis tilts the vector towards the positive \(z\)-axis.
The new \(x\)-component will be:
\[ v_x = 3 \cos\theta \]
The new \(z\)-component will be:
\[ v_z = 3 \sin\theta \]
Since there is no rotation or movement along the \(y\)-axis, the \(y\)-component remains zero.
Writing the vector in unit vector notation:
\[ \vec{v}_{new} = (3 \cos\theta)\hat{i} + (0)\hat{j} + (3 \sin\theta)\hat{k} \]
\[ \vec{v}_{new} = 3\cos\theta \hat{i} + 3\sin\theta \hat{k} \]
This matches option (D).
Step 4: Final Answer:
The vector is resolved into its components along the \(x\) and \(z\) axes after the rotation, yielding \(3\cos\theta \hat{i} + 3\sin\theta \hat{k}\).
The problem involves the rotation of a vector in a specific plane within a 3D coordinate system.
A vector \(\vec{v}\) originally lies along the \(x\)-axis. Its initial coordinates are \((3, 0, 0)\).
It is rotated in the \(x-z\) plane. An observer looking from the \(+y\) axis sees the \(x-z\) plane as their field of view.
In a standard right-handed coordinate system, looking from the \(+y\) axis down to the origin, the \(x\)-axis points to the right and the \(z\)-axis points upward in that view.
Rotating "clockwise" with respect to the \(x\)-axis from the \(+y\) observer's perspective means the vector moves from the positive \(x\)-axis toward the positive \(z\)-axis.
Step 2: Key Formula or Approach:
For a vector of magnitude \(A\) rotated by angle \(\theta\) in a plane:
Component along starting axis = \(A \cos\theta\).
Component along the axis it is rotating towards = \(A \sin\theta\).
Step 3: Detailed Explanation:
The magnitude of the vector is \(|\vec{v}| = 3\).
Initially, it is along the \(+x\) direction (\(3\hat{i}\)).
The rotation takes place in the \(x-z\) plane.
When viewed from the \(+y\) axis, the standard 2D axes are \(x\) (horizontal) and \(z\) (vertical).
A clockwise rotation by angle \(\theta\) starting from the positive \(x\)-axis tilts the vector towards the positive \(z\)-axis.
The new \(x\)-component will be:
\[ v_x = 3 \cos\theta \]
The new \(z\)-component will be:
\[ v_z = 3 \sin\theta \]
Since there is no rotation or movement along the \(y\)-axis, the \(y\)-component remains zero.
Writing the vector in unit vector notation:
\[ \vec{v}_{new} = (3 \cos\theta)\hat{i} + (0)\hat{j} + (3 \sin\theta)\hat{k} \]
\[ \vec{v}_{new} = 3\cos\theta \hat{i} + 3\sin\theta \hat{k} \]
This matches option (D).
Step 4: Final Answer:
The vector is resolved into its components along the \(x\) and \(z\) axes after the rotation, yielding \(3\cos\theta \hat{i} + 3\sin\theta \hat{k}\).
Was this answer helpful?
0
Top Questions on Viscosity
- An air bubble of diameter 6 mm rises steadily through a solution of density 1750kg / m3 at the rate of 0.35 cm/s. The co-efficient of viscosity of the solution (neglect density of air) is ____Pas (given, g = 10ms-2)
- JEE Main - 2023
- Physics
- Viscosity
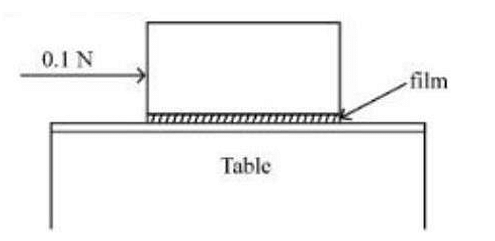
- A metal block of base area \(0.20 \,m^2\) is placed on a table, as shown in figure. A liquid film of thickness \(0.25\, mm\) is inserted between the block and the table. The block is pushed by a horizontal force of 0.1 N and moves with a constant speed. If the viscosity of the liquid is \(5.0×10^{−3}Pl\), the speed of block is ________ \(×10^{−3}m/s\)
- JEE Main - 2023
- Physics
- Viscosity
- The diameter of an air bubble which was initially 2 mm, rises steadily through a solution of density 1750 kg m–3 at the rate of 0.35 cms–1. The coefficient of viscosity of the solution is _______ poise (in nearest integer). (The density of air is negligible).
- JEE Main - 2022
- Physics
- Viscosity
A spherical ball is dropped in a long column of viscous liquid. The speed v of the ball as a function of time t may be best represented by

- BITSAT - 2010
- Physics
- Viscosity
- Want to practice more? Try solving extra ecology questions todayView All Questions